
| 我公司承担的中国石油大学(华东)运动控制项目于近日完成建设工作,此项目包含滑动自平衡偏置倒立摆和高阶柔性直线控制系统。设备的外观体积、实验功能、简易操作、调试培训得到用户老师的肯定,且已用此设备发表多篇论文。 此项目设备是多阶、多输入多输出的复杂控制系统,可调多种变量,可增加二级驱动,具有多种配置选择,灵活搭建系统为开放性设计,提供Simulink编程环境,其最大的好处是可以提供准确的动力学模型和各种控制算法包,是控制学,科教学、科研、毕业设计的理想平台。在美国众多的著名大学里是控制类实验室的必备设备,经常出现在动力学和控制学的教材中,在国外控制类论文中经常被作为评估控制方法的验证平台。
系统机械结构具备可调质量块、可变弹簧和可调阻尼器。与高阶柔性扭转控制实验系统一样,该系统也可演示如刚体PID控制、超前/滞后补偿、相位和增益裕量、轨迹跟踪与调节、先进的高阶并置和非并置系统控制等基本问题。同时,还可展示柔性系统的显著特征,如模态、固有频率、瞬态和频率响应特性。在任意输出端(质量块载体)可增加一个二级驱动(可选),以构成一个多输入多输出(MIMO)系统(需要USR或RTWT/RTLT应用软件),用于自抗扰的研究。 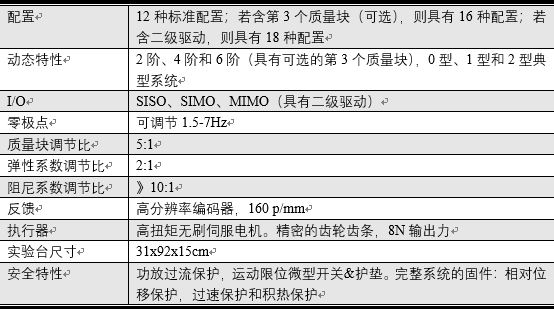 实验内容: 1.系统辨识&动态建模; 2.刚体PD&PID控制; 3.基本的开环&闭环特性(二阶系统,瞬态响应和频率响应,刚体&柔性体,模态&频率、时域&频域关系); 4.相位&增益裕量; 5.奈奎斯特(Nyquist)稳定性; 6.根轨迹设计; 7.参数变化灵敏度; 8.鲁棒控制; 9.跟踪控制; 10.自抗扰(需要二级驱动); 11.柔性结构控制(陷波滤波器,并置式传感器/执行器,非并置式控制,低权限闭环控制&高权限闭环控制,极点配置,线性二次调节器); 12.实际控制问题(驱动器饱和,传感器量化,离散时间采样,自定义控制执行); 13.可重构装置和接口软件的通用性可支持实际控制系统中几乎所有问题的研究。该实验装置非常适用于刚体和高阶离散柔性系统的研究。 12种系统标准配置 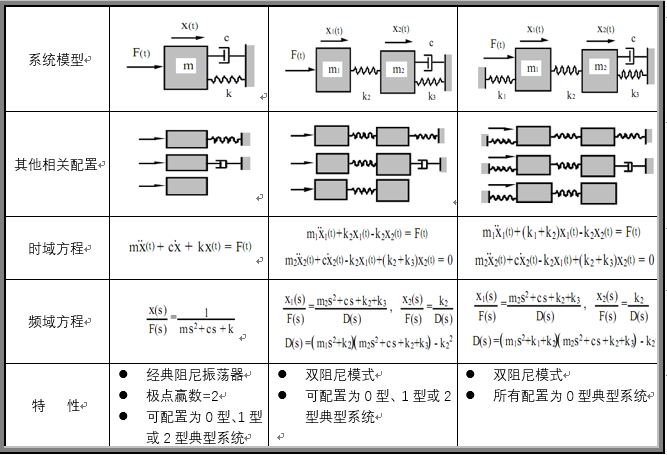
该系统的机械结构包括可拆除/可调节的力矩臂,在水平杆和垂直杆上进行配重,以实现系统动态的快速调节。在连接处具有直线和旋转球形轴承,实现低摩擦和动态性能一致。 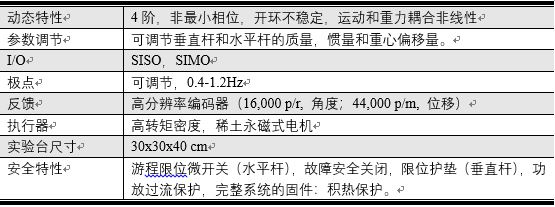 倒立摆实验是一个右半平面具有零极点的非线性系统控制(针对某些设计方法,动态模型线性化) 实验内容: 1.系统辨识&动态建模 2.连续闭环设计 3.增强型动态滤波控制 4.LQR控制设计 5.跟踪控制 系统标准配置 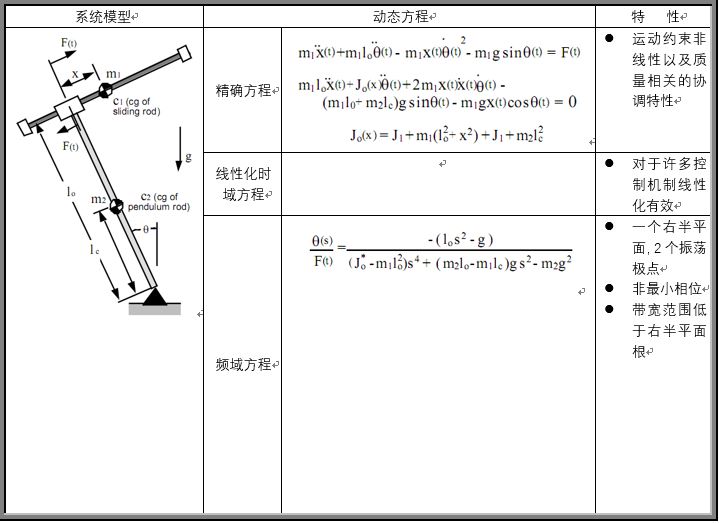 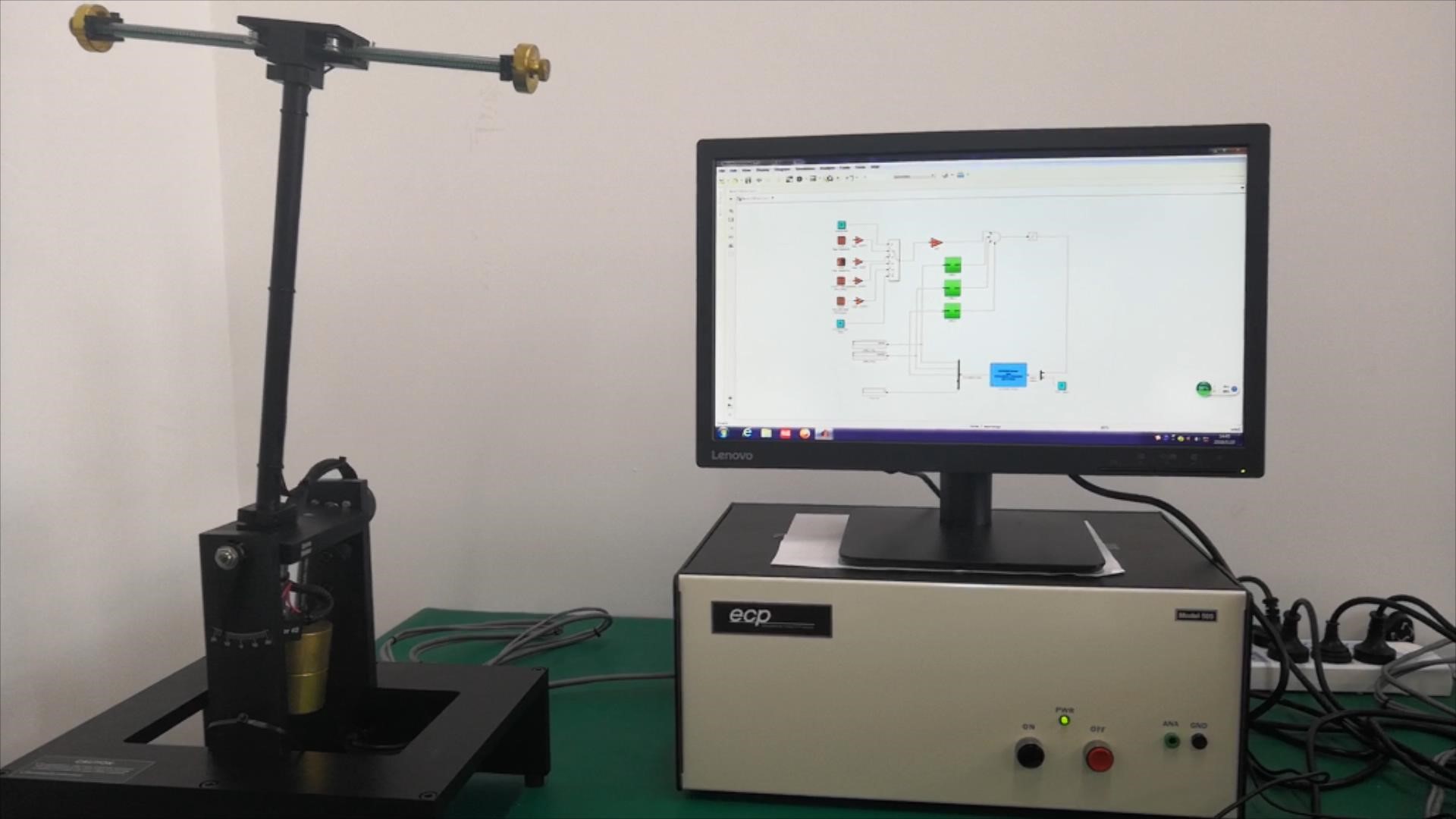  (责任编辑:Tsingso) |
- 实验设备
- H102 间壁式换热实验台
- R715 制冷实验装置
- AF1300 亚音速风洞
- TD300内燃机实验系统
- DVI3000间歇/连续蒸馏实验台
- 联系我们 Contact
- 地址:北京市昌平区科星西路106号院
- 3号楼6层611
- 广州:广州市黄埔区开创大道2403号
- 至泰广场A4栋1410室
- 石家庄:石家庄裕华区槐底一区1-2
- -3201
- 成都办事处:双流区香薰大道绣苑花苑
- 电话:010-82780961
- 手机:18500300266
- 邮箱:[email protected]
- 产品搜索 Search
中国石油大学(华东)运动控制项目完成验收
时间:2021-09-09 14:51来源:未知 作者:Tsingso 点击:
次
我公司承担的中国石油大学(华东)运动控制项目于近日完成建设工作,此项目包含滑动自平衡偏置倒立摆和高阶柔性直线控制系统。